Mobile Additive Manufacturing
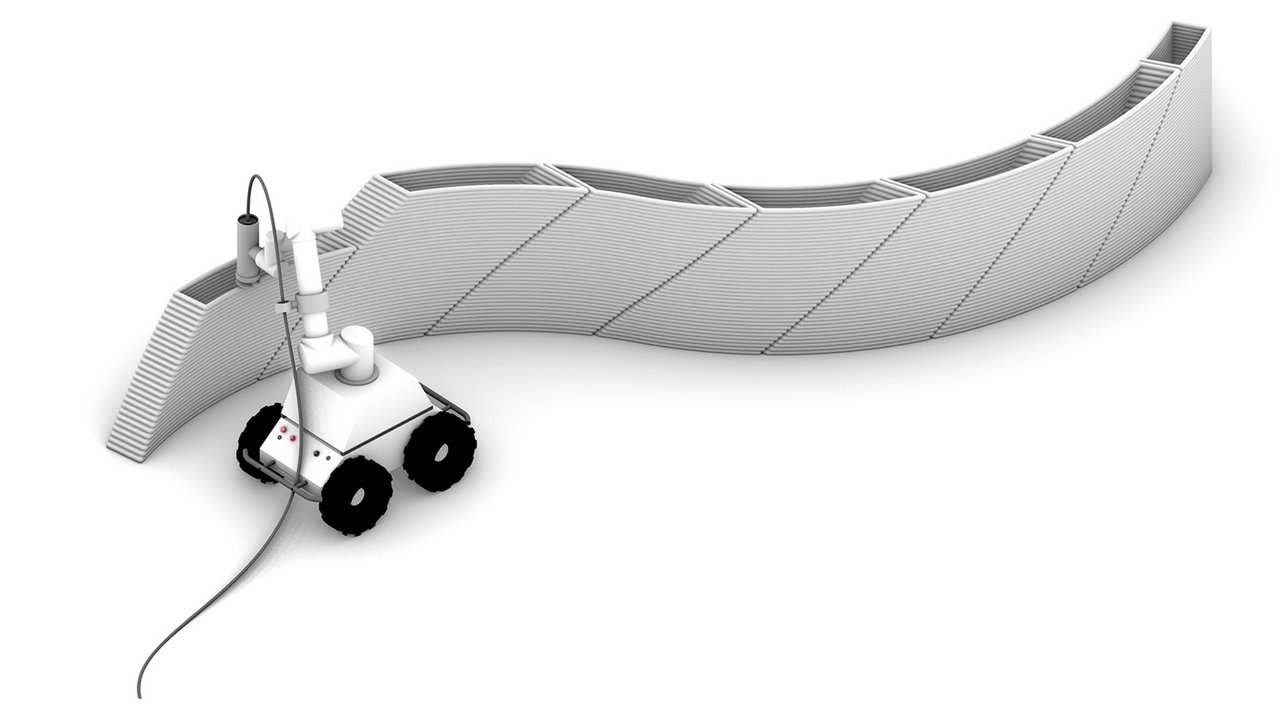
This research examines the architectural implications of mobile robotics for AM in construction and develops methods for their implementation. The material deposition method of concrete extrusion is used to investigate mobile part-based AM strategies to produce large objects whose size exceeds the static workspace of the robot. By implementing advanced sensor and control solutions, autonomous localization and precise manipulation techniques for mobile AM are explored. In addition, this research aims to provide scalability to AM processes by examining the use of cooperative robots to collaborate on single fabrication jobs. The ultimate aim of this research is to develop mobile AM technology for its direct implementation on construction sites.
Collaborators
In cooperation with
- Institute of Assembly Technology (Prof. Dr.-Ing. Annika Raatz) Faculty of Mechanical Engineering, Leibniz University Hannover
- Chair of Materials Science and Testing (Prof. Dr.-Ing. Christoph Gehlen), TUM
- Institute of Construction Engineering and Management (Prof. Dr.-Ing. Patrick Schwerdtner), TUBS
- Institute of Geodesy and Photogrammetry (Prof. Dr.-Ing. Markus Gerke), TUBS
- Institute of Structural Design / Junior Professorship for Digital Building Fabrication (Prof. Dr. sc. ETH Zurich Norman Hack), TUBS
Funding programme
This research is supported by the German Research Foundation (DFG) – project number 414265976 –
Collaborative Research Centre Transregio 277 "Additive Manufacturing in Construction"
Duration
- 2020-2024
Publications


Mobile Additive Manufacturing: A robotic system for cooperative on-site construction
Dielemans, G.; K. Dörfler
IROS 2021 Workshop: Robotic Fabrication: Sensing in Additive Construction
2021
PDF
